

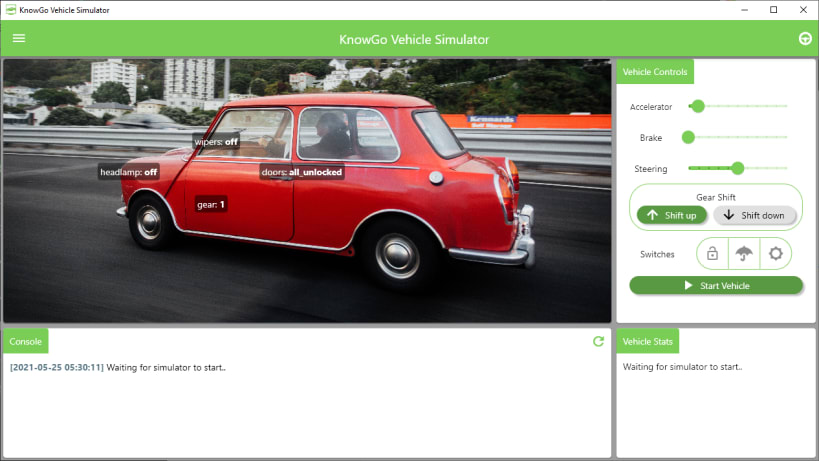
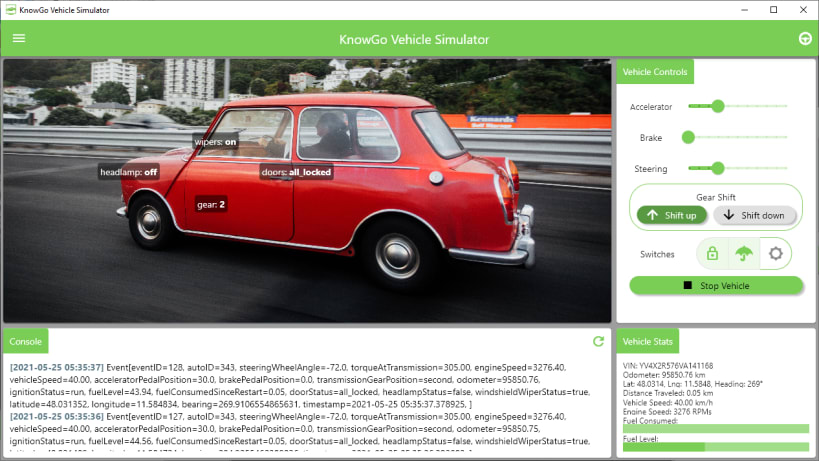
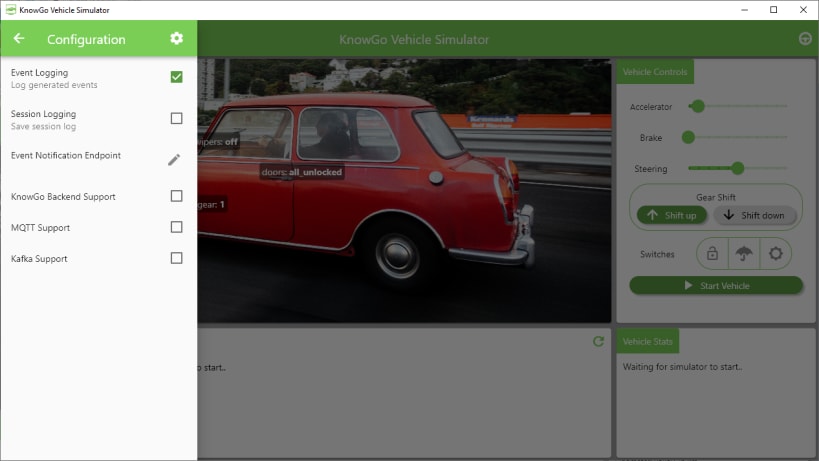
KnowGo Vehicle Simulator is an interactive multi-platform Connected Car simulator capable of generating and streaming realistic vehicle telemetry to REST API endpoints, KnowGo Car backends, and various data brokers (MQTT, Kafka) to aid in the development of Connected Car services.
It exposes a simple REST API to further allow the vehicle state to be directly manipulated, enabling connectivity with external vehicle data sources and further allowing the simulator to act as a digital twin for connected vehicles.
You are about to open
Do you wish to proceed?
Thank you for your report. Information you provided will help us investigate further.
There was an error while sending your report. Please try again later.
Snaps are applications packaged with all their dependencies to run on all popular Linux distributions from a single build. They update automatically and roll back gracefully.
Snaps are discoverable and installable from the Snap Store, an app store with an audience of millions.
Snapd can be installed from Manjaro’s Add/Remove Software application (Pamac), found in the launch menu. From the application, search for snapd, select the result, and click Apply.
Alternatively, snapd can be installed from the command line:
sudo pacman -S snapd
Once installed, the systemd unit that manages the main snap communication socket needs to be enabled:
sudo systemctl enable --now snapd.socket
To enable classic snap support, enter the following to create a symbolic link between /var/lib/snapd/snap and /snap:
sudo ln -s /var/lib/snapd/snap /snap
Either log out and back in again, or restart your system, to ensure snap’s paths are updated correctly.
To install KnowGo Vehicle Simulator, simply use the following command:
sudo snap install knowgo-vehicle-simulator
Browse and find snaps from the convenience of your desktop using the snap store snap.

Interested to find out more about snaps? Want to publish your own application? Visit snapcraft.io now.
