
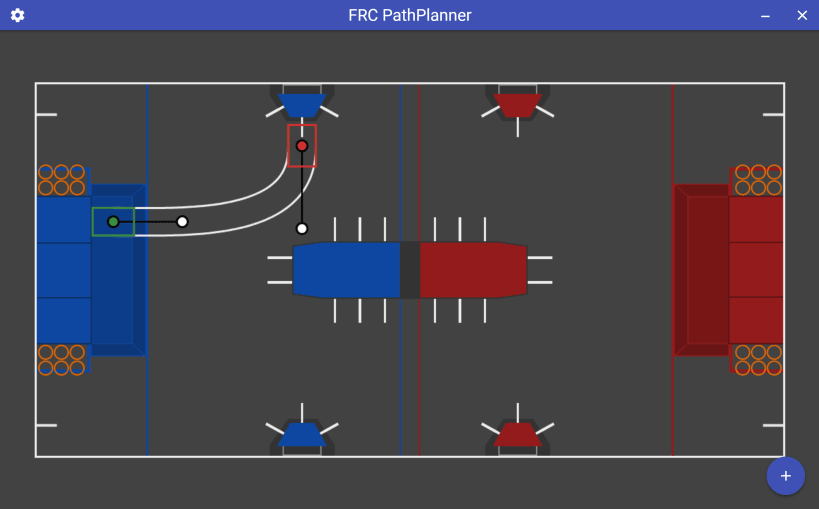
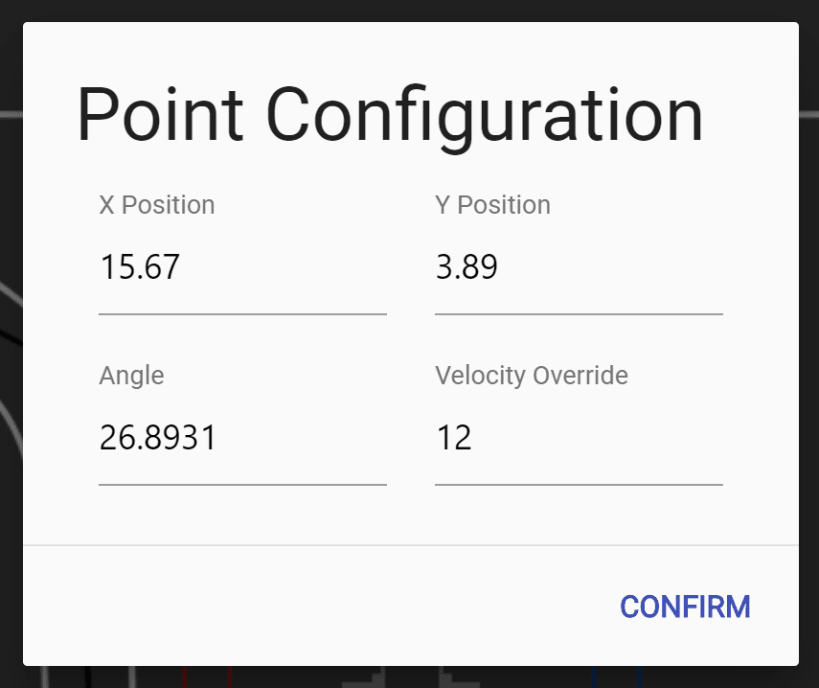
PathPlanner is a motion profile generator for FRC robots created by team 3015. Every path allows for manual tuning of the robot position and the curve radius at every point. It allows you to create the perfect path for your robot quicker and easier than other generators. Path Planner can handle more complex paths than other generators because it will slow down the robot as it heads into a turn instead of going through it as fast as possible. Inspiration came from Vannaka's Generator which uses Jaci's PathFinder. We used it during the 2018 season but struggled to create complex paths that the robot could follow accurately due to the high speed turns.
You are about to open
Do you wish to proceed?
Thank you for your report. Information you provided will help us investigate further.
There was an error while sending your report. Please try again later.
Snaps are applications packaged with all their dependencies to run on all popular Linux distributions from a single build. They update automatically and roll back gracefully.
Snaps are discoverable and installable from the Snap Store, an app store with an audience of millions.
If you’re running Kubuntu 16.04 LTS (Xenial Xerus) or later, including Kubuntu 18.04 LTS (Bionic Beaver) and Kubuntu 18.10 (Cosmic Cuttlefish), you don’t need to do anything. Snap is already installed and ready to go.
Versions of Kubuntu between 14.04 LTS (Trusty Tahr) and 15.10 (Wily Werewolf) don’t include snap by default, but snap can be installed from the command line as follows:
sudo apt update
sudo apt install snapd
To install PathPlanner, simply use the following command:
sudo snap install pathplanner
Browse and find snaps from the convenience of your desktop using the snap store snap.

Interested to find out more about snaps? Want to publish your own application? Visit snapcraft.io now.
