
Install latest/stable of PathPlanner
Ubuntu 16.04 or later?
Make sure snap support is enabled in your Desktop store.
Install using the command line
sudo snap install pathplannerDon't have snapd? Get set up for snaps.
You are about to open
Do you wish to proceed?
Thank you for your report. Information you provided will help us investigate further.
There was an error while sending your report. Please try again later.
Generate an embeddable card to be shared on external websites.
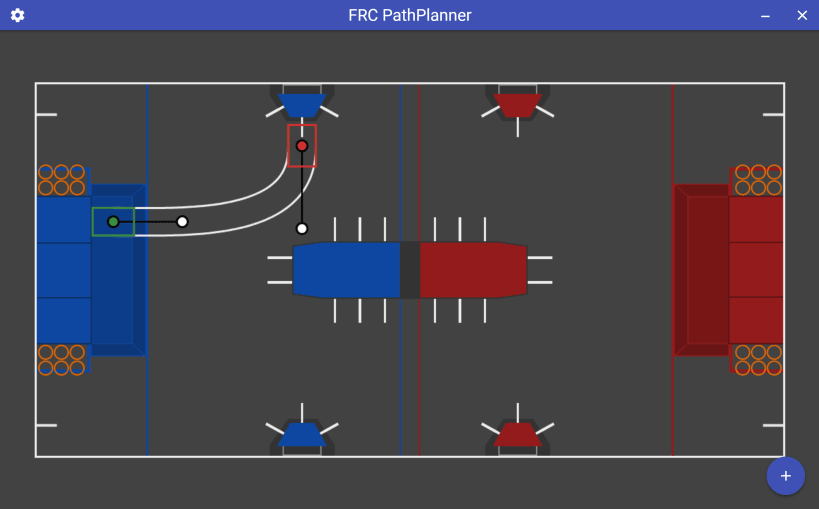
PathPlanner is a motion profile generator for FRC robots created by team 3015. Every path allows for manual tuning of the robot position and the curve radius at every point. It allows you to create the perfect path for your robot quicker and easier than other generators. Path Planner can handle more complex paths than other generators because it will slow down the robot as it heads into a turn instead of going through it as fast as possible. Inspiration came from Vannaka's Generator which uses Jaci's PathFinder. We used it during the 2018 season but struggled to create complex paths that the robot could follow accurately due to the high speed turns.
Choose your Linux distribution to get detailed installation instructions. If yours is not shown, get more details on the installing snapd documentation.
