
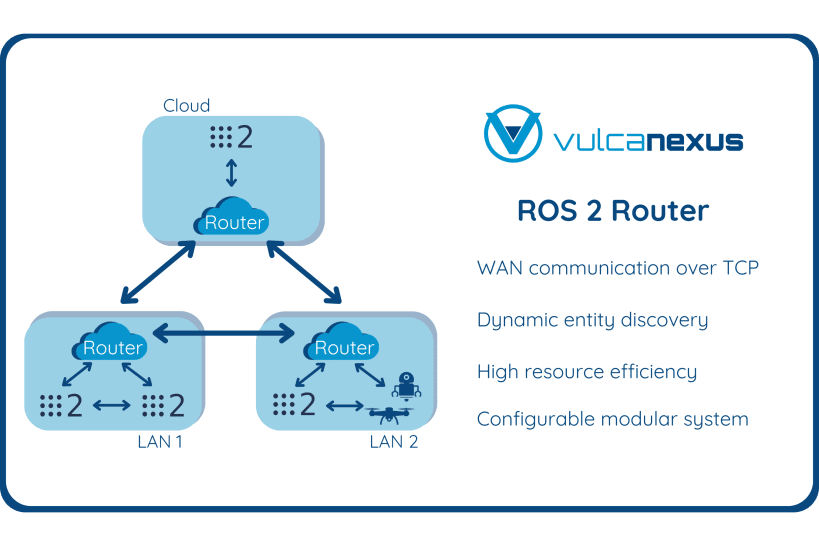
This router is an open-source solution that provides an easy way to route traffic from one network to another through WAN communication.
The Vulcanexus ROS 2 Router users can:
This solution offers easy deployment due to a configurable modular system. For more information visit the official documentation: https://docs.vulcanexus.org/en/latest/rst/introduction/tools/router.html
Looking for commercial support? Contact info@eprosima.com
You are about to open
Do you wish to proceed?
Thank you for your report. Information you provided will help us investigate further.
There was an error while sending your report. Please try again later.
Snaps are applications packaged with all their dependencies to run on all popular Linux distributions from a single build. They update automatically and roll back gracefully.
Snaps are discoverable and installable from the Snap Store, an app store with an audience of millions.
On Debian 9 (Stretch) and newer, snap can be installed directly from the command line:
sudo apt update
sudo apt install snapd
After this, install the snapd snap in order to get the latest snapd:
sudo snap install snapd
To install Vulcanexus Router, simply use the following command:
sudo snap install vulcanexus-router --edge
Browse and find snaps from the convenience of your desktop using the snap store snap.

Interested to find out more about snaps? Want to publish your own application? Visit snapcraft.io now.
